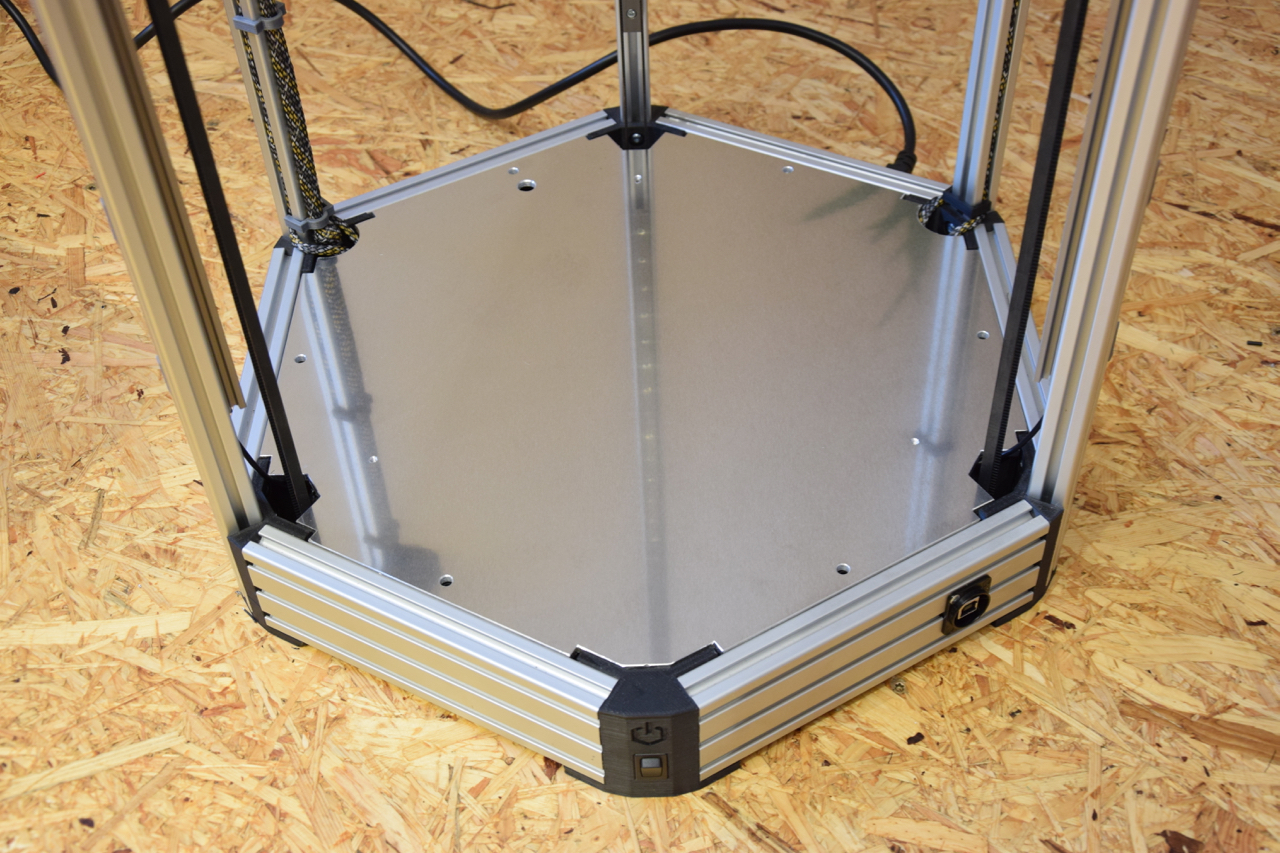
Wirklich viel Arbeit war die Zwischenplatte. 5mm starkes AlMg3 und sehr viele Ecken. Da wünscht man sich wirklich eine CNC Fräse.
Es geht aber auch mit Hausmitteln.
Die Löcher/Gewinde an den sechs Kanten ermöglichen eine Verschraubung mit dem Grundrahmen. Ein evtl. notwendige Nivellierung der Grundplatte mittels Konterschrauben lässt sich so ebenfalls realisieren.

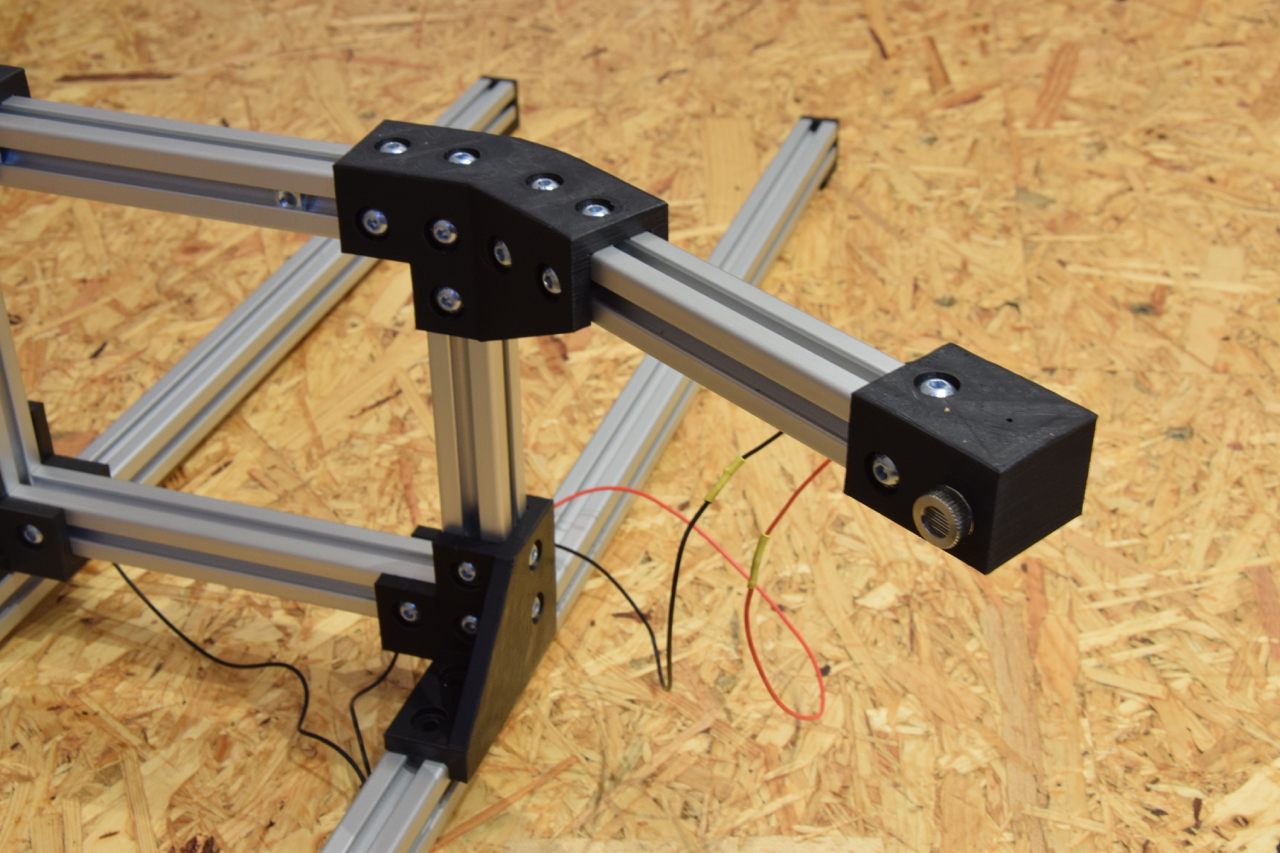
Für das Kopfteil habe ich noch eine schicke 5mm Aluplatte gemacht. Die 3 Löcher mit den M4 Innensechskantschrauben sind für die Riemenspanner. In das mittige Loch kann ich noch einen Spulenhalter montieren

Um der Basis mehr Stabilität und Masse zu verleihen habe ich eine Grundplatte angefertigt. 2 Lagen 19 mm starkes MDF flächig verklebt und verschraubt.
Für das Auge habe ich noch ein Fase angefräßt und das Material mit Hartwachs behandelt.

Schnell noch 6 Winkel designed und gedruckt. Die Winkel sind leicht untermaßig um das Profil Richtung Grundplatte zu ziehen.

Die Klammern/Winkel gibt es wieder hier: http://www.thingiverse.com/thing:927540

































{kind=link}