Da ich ausschließlich ein 24V Netzteil verbaut habe, aber dennoch die günstigeren und leichter zu beschaffenden 12V Lüfter verwenden möchte, musste ich mir was einfallen lasse.
Ich hab mir über eBay 5 Mini-Step-Down Konverter besorgt.
5 Stück = 7 €. Da lohnt sich jede Bastelei mit Feststpannungsreglern etc. nicht.
Ursprünglich hatte ich die Idee, die stepdown Konverter auf einem freien Treiberplatz des RADDS zu plazieren.
Hier die Stepdown Konverter im Größenvergleich zu einen China A4988 Treiber.

Leider stimmt das Rastermaß und die Pinbelegung nicht ansatzweise. So habe ich mich dazu entschlossen direkt mehrere Stepdowns an einer anderen Stelle im Gehäuse unterzubringen.
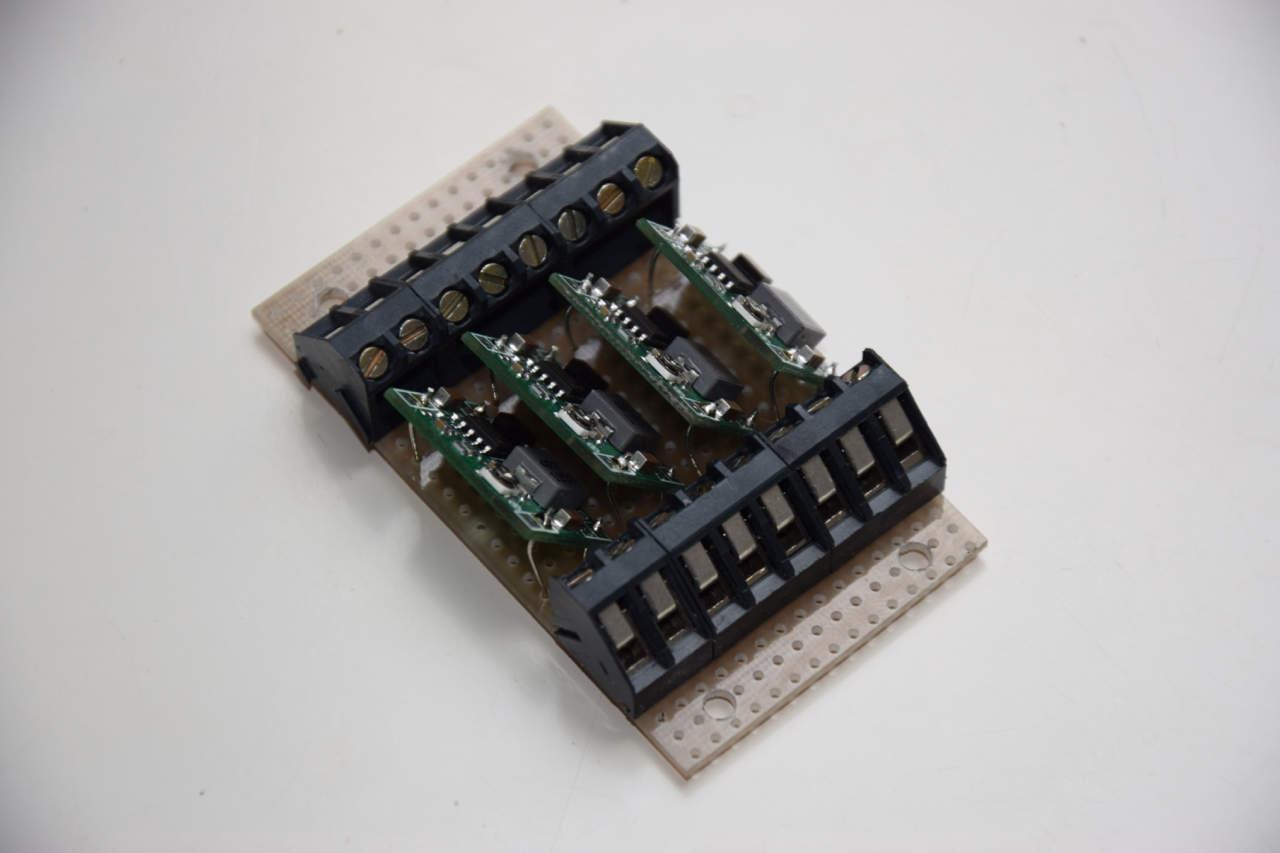
Die Idee die maximale Spannung verschiedener Kreise getrennt regeln zu können, gefiel mir gut. Auf die Weise lässt sich z.B. die Beleuchtung oder eine maximale Lüfterdrehzahl bequem per Poti regeln zu können.
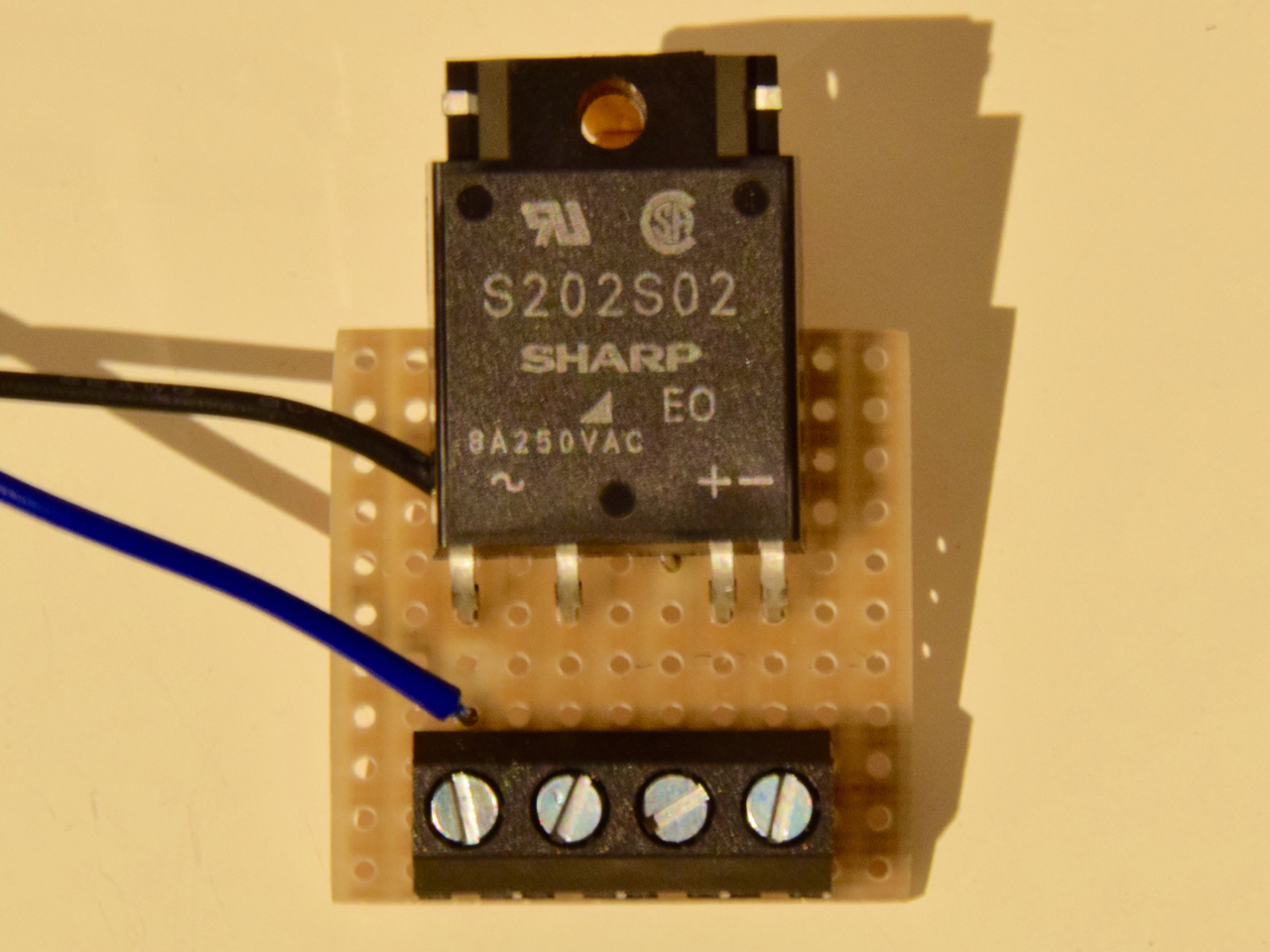
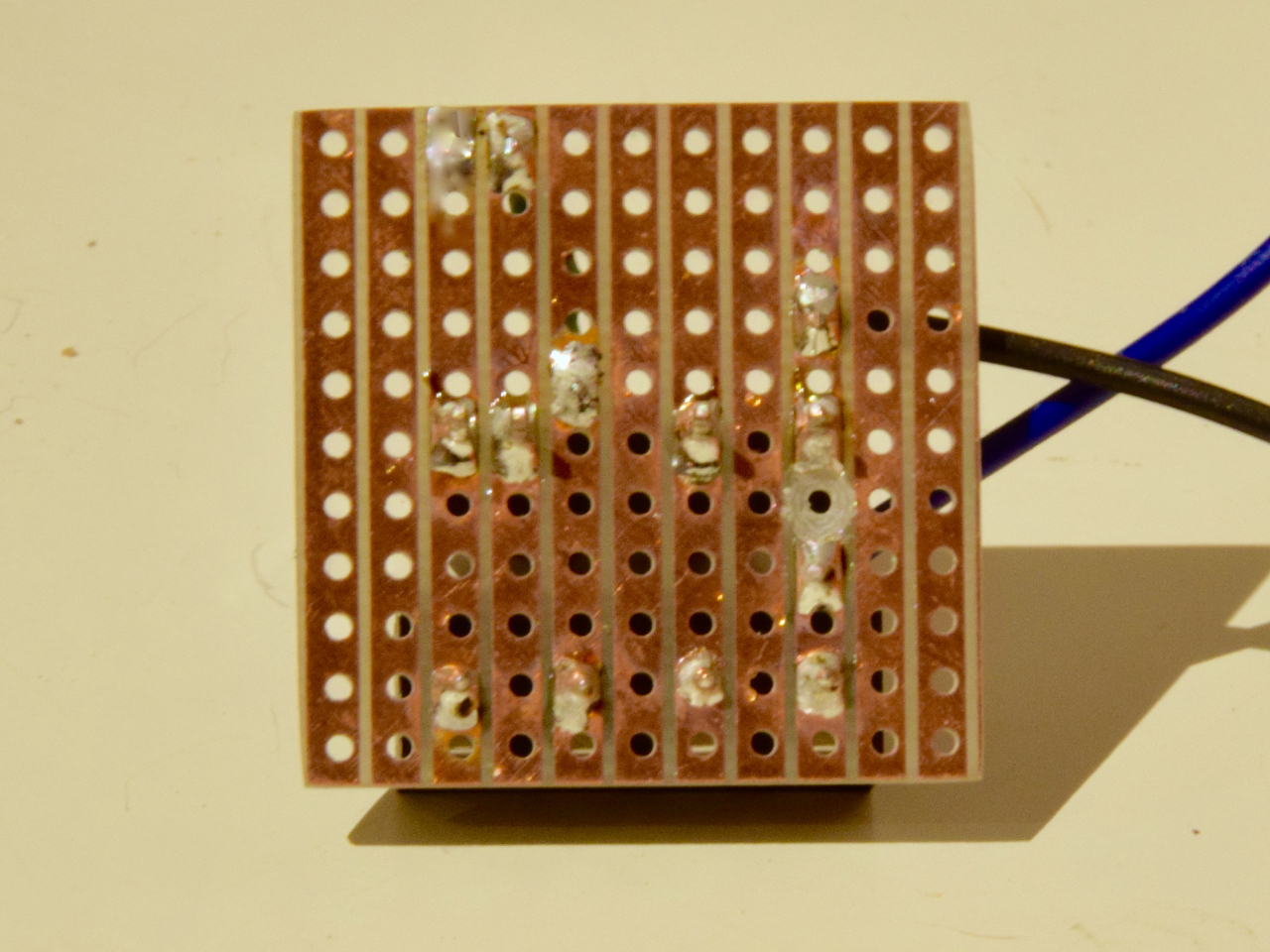
Nach einer Suche in der Bastelkiste ist folgende Lochstreifenplatine entstanden:
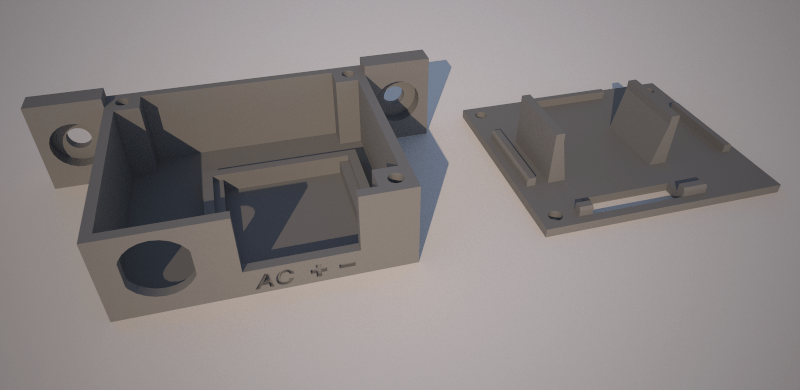
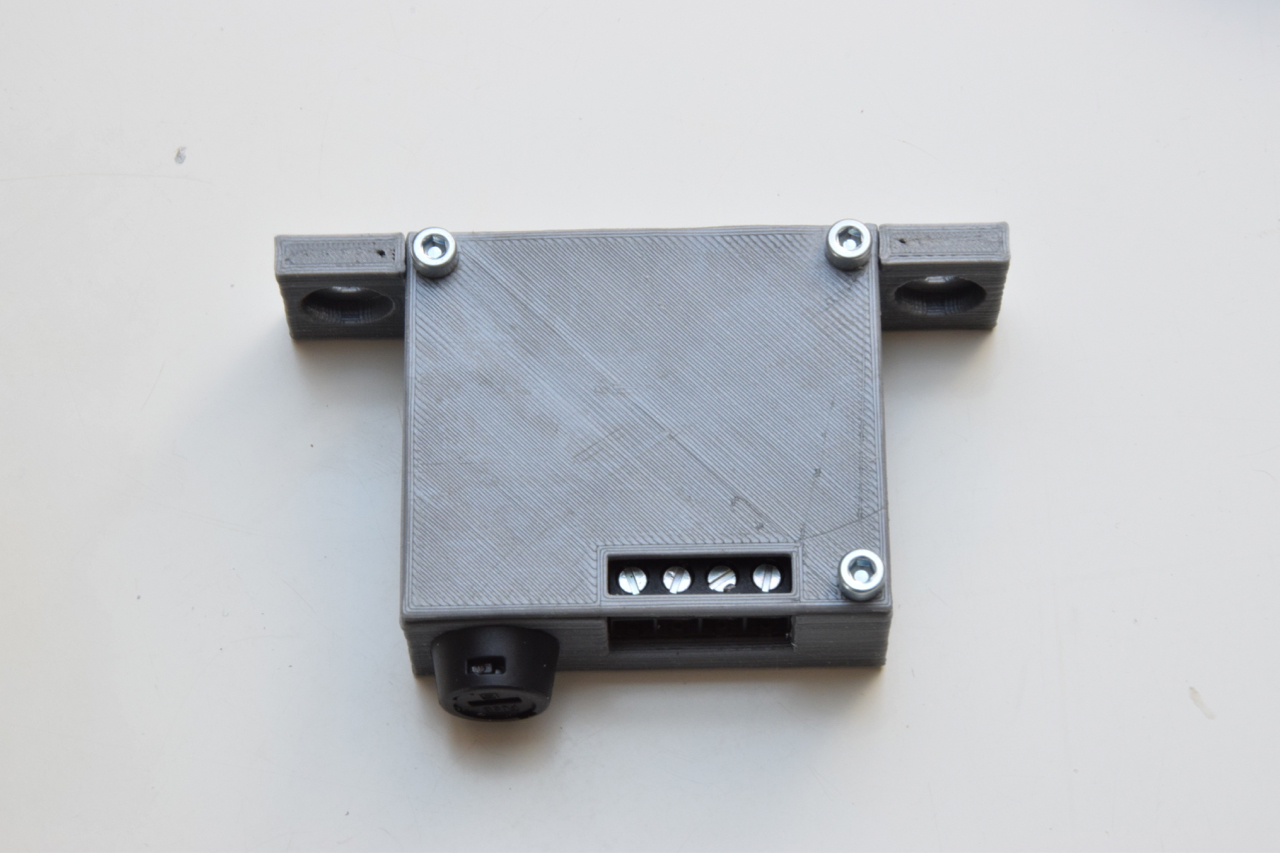
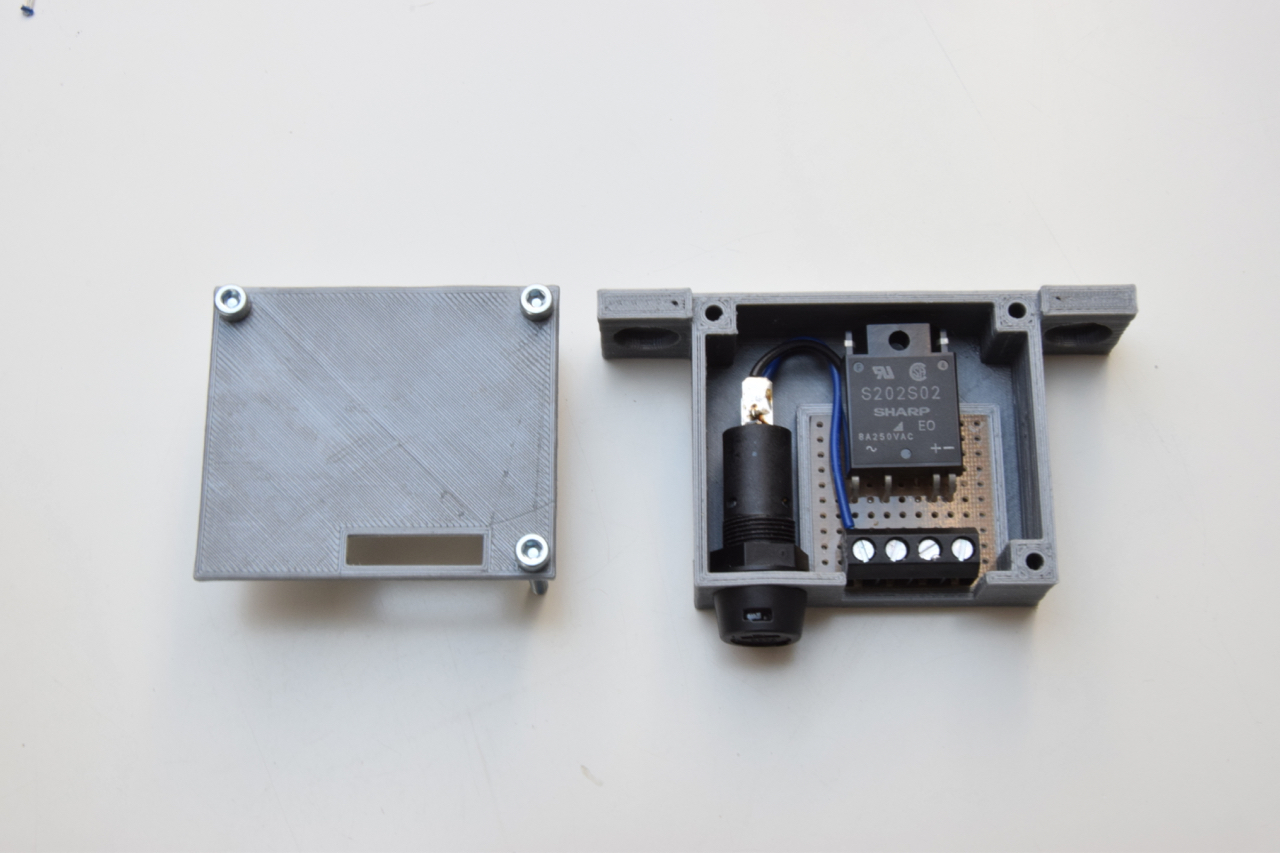
Schnell noch einen Halter gezeichnet und gedruckt:

Der Halter ist als .stl unter meinem Thingiverse-Account zu finden:
http://www.thingiverse.com/thing:838808
Die Step-down Koverter lassen sich sehr genau und feinfühlig einstellen.
Ungekühlt soll ein Konverter dauerhaft 1,5 A vertragen.
Die Qualität der Output Spannung ist gut. Bei einem Input von 24V und einem Output von 12V konnte ich eine Spannungschwankung von <0,1V messen. Alle 2 ms.