Alle meine bisherigen Drucker hatten ein durchgängigen Kabelbaum. Vom Arduino-Shield bis zum Hotend. Sofern die Elektronik nicht leicht zugänglich ist, ist dies äusserst unpraktisch bei einer eventuellen Fehlersuche. Der Aufwand eine Ader mit Kabelbruch austauschen ist ebenfalls nicht ohne.
Im Reichert Katalog bin ich schon vor Wochen auf tolle D-Sub Steckverbinder gestoßen. Leider ausverkauft. Nachdem die jetzt endlich lieferbar waren, habe ich mir sofort einen Satz geordert.

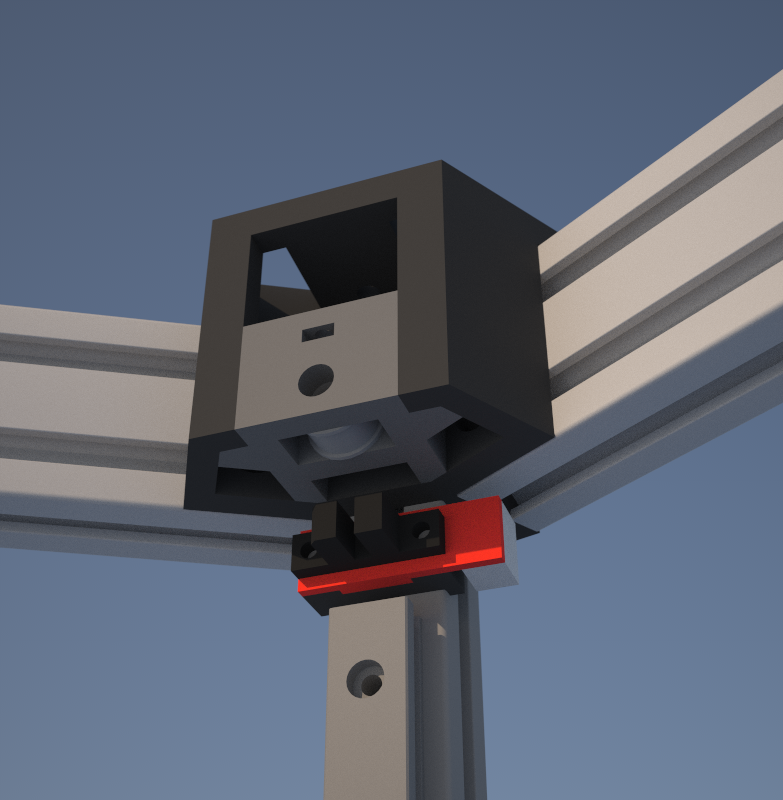
Das Gehäuse für die Befestigung an einer horizontalen Strebe war etwas mehr Aufwand als die üblichen Halter. Verhältnismäßig war das Gehäuse jedoch auch schnell entworfen und gedruckt.

Die Verdrahtung in Richtung RADDS ist auch schon gelötet.
Falls ihr euch für gekaufte D-Sub Gehäuse entscheiden solltet, achtet darauf ein Gehäuse mit einem langen und breiten Baumaß zu bekommen. Die Verschraubung sollte weit außen liegen. Die Hochstromkontakte liegen ungünstig am Rand des D-Sub Steckers und lassen sich nicht in Richtung Gehäusemitte verbiegen.
Fertig sieht es dann so aus:

Um die Kabel ordentlich an den Profilen verlegen zu können, habe ich meine bewährten Kabelclips um eine weitere Größe ergänzt.


Die Teile sind, wie immer, unter meinen Thingiverse Account zu finden:
D-Sub-Case: http://www.thingiverse.com/thing:845346
Kabelclips: http://www.thingiverse.com/thing:832279